Welding ABC
Robotic welding
February 18, 2024
Robotic welding applications, systems, and techniques
Kemppi marketing

Kemppi marketing
Kemppi marketing
Kemppi marketing aims to evoke discussion on the transformation of modern welding and bring you the latest stories from within the global welding industry, told by true experts in their respective fields.
Related products

Product family
The Kemppi AX MIG Welder brings powerful performance and maximum productivity potential to your robotic welding system. Enjoy easy integration and ensure repeatable, high-quality welds with high-performance arc welding applications.
More blog posts

MIG/MAG welding
MIG welding applications, equipment, and techniques
Welding ABC

Other welding methods
MIG brazing and laser, submerged, plasma, spot, friction, and explosion welding
Welding ABC
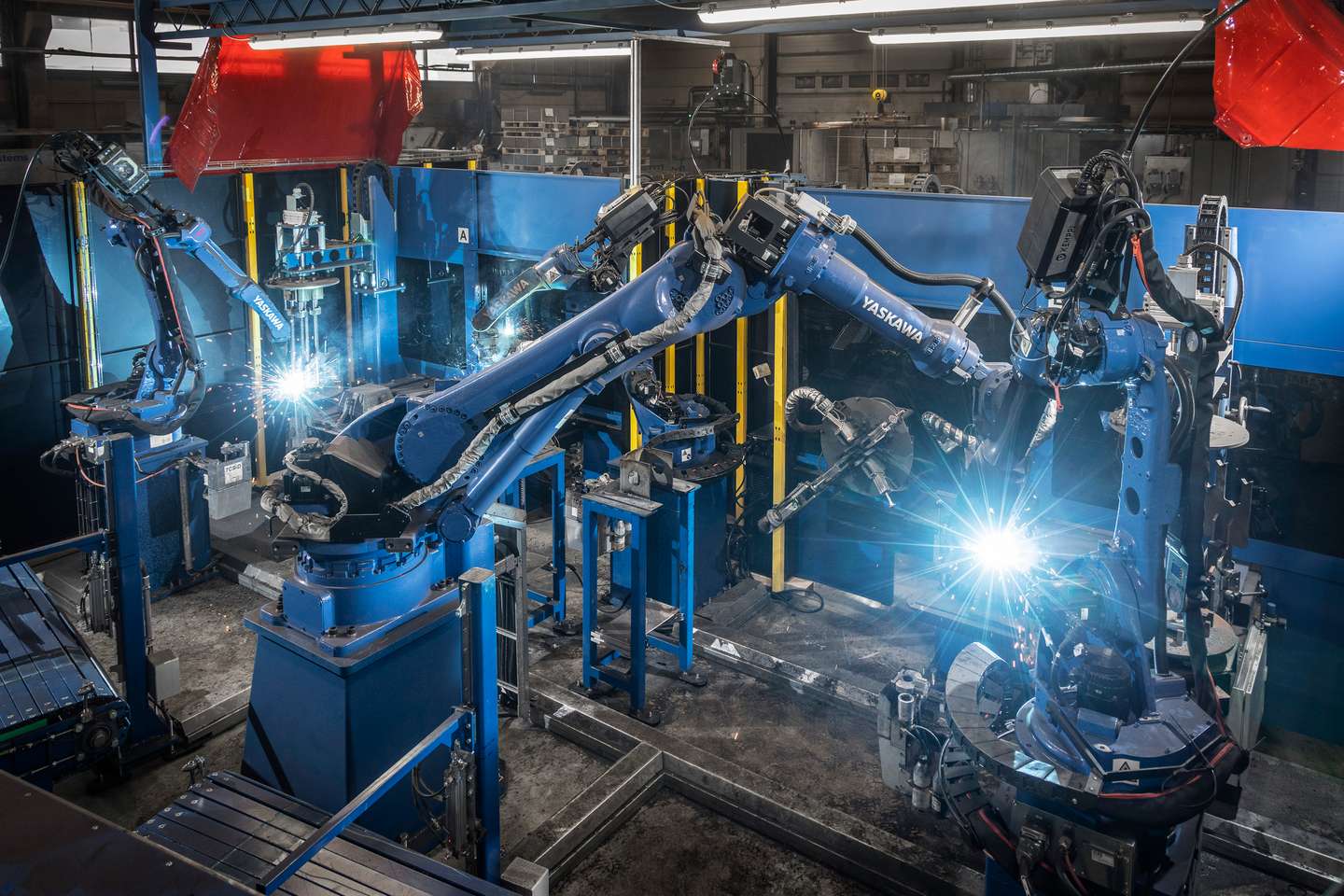
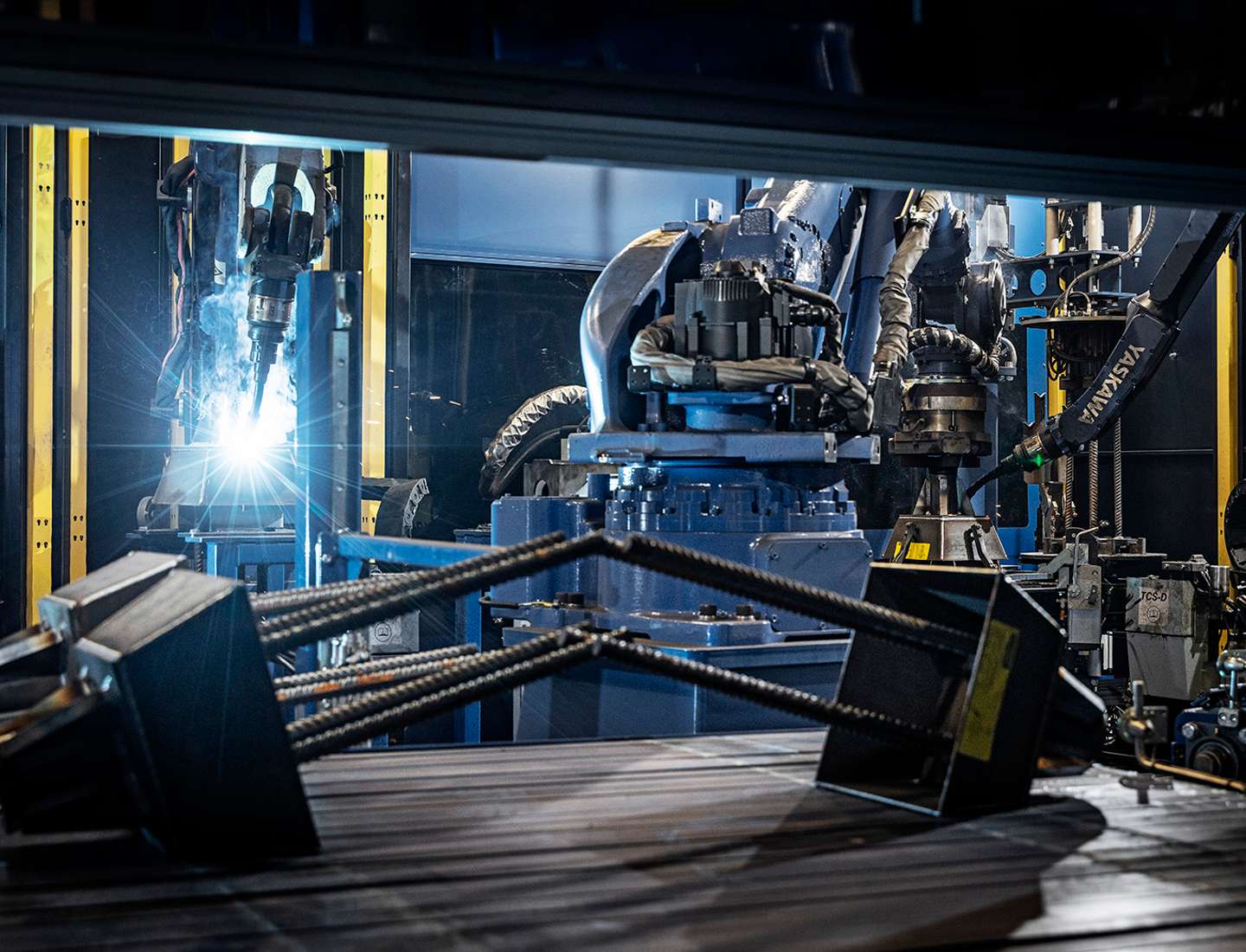
Power and Performance for Robotic Welding
Kemppi's new robotic welding machine is significantly more efficient and versatile than its predecessors. The AX MIG Welder is designed to maximize the potential of any robotic welding system – it offers powerful uninterrupted performance, an easy-to-use interface, and high-quality welds for more productive robotic arc welding operations.
Welding automation

Smoothly integrating a welding power source into a robotic welding system
In today's advanced manufacturing processes, robotic welding systems have become increasingly common due to their precision, efficiency, and cost-effectiveness. However, the successful integration of a welding power source into a robotic welding system is crucial for achieving optimal performance. This article contains valuable insights and guidelines on how to smoothly integrate a welding power source into a robotic welding system for enhanced productivity and quality in welding operations.
Welding automation

Eurosatory 2026 And the Future of Defence Manufacturing
Eurosatory 2026 highlighted a clear shift in modern defence manufacturing. While defence systems are becoming more digital, networked, and autonomous, their foundation remains physical. From armoured vehicles and artillery to industrial resilience, welding quality, steel structures, and production discipline remain paramount to defence readiness.
Digitalization, Innovation

What Built to Last Really Means in Defence and Marine Welding
Critical defence and military vessels and marine structures are built for decades of demanding service. This article explores what 'built to last' means in welding, from harsh-condition reliability and repeatable weld quality to traceability across long vessel lifecycles.
Innovation, Digitalization
